Chapitre 4 — Lois de Probabilité
1 Introduction
Il est toujours possible d’associer à une variable aléatoire une probabilité et définir ainsi une loi de probabilité. Lorsque le nombre d’épreuves augmente indéfiniment, les fréquences observées pour le phénomène étudié tendent vers les probabilités et les distributions observées vers les distributions de probabilité ou loi de probabilité.
Identifier la loi de probabilité suivie par une variable aléatoire donnée est essentiel car cela conditionne le choix des méthodes employées pour répondre à une question biologique donnée.
2 Lois discrètes
Par définition, les variables aléatoires discrètes prennent des valeurs entières discontinues sur un intervalle donné. Ce sont généralement le résultat de dénombrement.
2.1 Loi uniforme
2.1.1 Définition
Une distribution de probabilité suit une loi uniforme lorsque toutes les valeurs prises par la variable aléatoire sont équiprobables. Si \(n\) est le nombre de valeurs différentes prises par la variable aléatoire, \(\forall i, P(X = x_i) = \frac{1}{n}\)
Exemple :
La distribution des chiffres obtenus au lancer de dé (si ce dernier est non pipé) suit une loi uniforme dont la loi de probabilité est la suivante :

avec pour espérance : \(E(X) = \frac{1}{6}\sum\limits_{i = 1}^6 i = 3,5\) et pour variance \(V(X) = \frac{1}{6}\sum\limits_{i = 1}^6 {i^2 - E{(X)}^2} = 2,92\)
où les valeurs \({x_i}\) correspondent au rang \(i\) de la variable \(X\) dans la série.
2.1.2 Espérance et variance
Dans le cas particulier d’une loi discrète uniforme où les valeurs de la variable aléatoire \(X\) correspondent au rang \(x_i = i ( ∀ i ∈ [1, n ])\)
\(E(X) = \frac{n + 1}{2}\) et \(V(X) = \frac{{n^2} - 1}{12}\) Démonstration.
2.2 Loi de Bernoulli
2.2.1 Définition
Soit un univers \(\Omega\) constitué de deux éventualités, \(S\) pour succès et \(E\) pour échec
\(Ω = \{ E , S \}\)
sur lequel on construit une variable aléatoire discrète, « nombre de succès » telle que au cours d’une épreuve,
si \(S\) est réalisé, \(X = 1\)
si \(E\) est réalisé, \(X = 0\)
On appelle variable de Bernoulli ou variable indicatrice, la variable aléatoire \(X\) telle que :
\(X : \Omega \longrightarrow \mathbb{R}\)
\(X(\Omega) = \{0,1\}\)
La loi de probabilité associée à la variable de Bernoulli \(X\) telle que,
\(P ( X = 0) = q\)
\(P ( X =1) = p\) avec \(p + q = 1\)
est appelée loi de Bernoulli notée \(\mathcal{B}(1,p)\)
2.2.2 Espérance et variance
L’espérance de la variable de Bernoulli est
\(E(X) = p\)
car par définition \(E(X) = \sum\limits_{i = 1}^2 {x_i} {p_i} = (0 \times q) + (1 \times p) = p\)
La variance de la variable de Bernoulli est
\(V(X) = pq\)
car par définition
\(V(X) = \sum\limits_{i = 1}^2 {x_i^2} {p_i} - E(X)^2 = [(0 \times q) + (1 \times p)] - p^2\)
d’où \(V(X) = p - p^2 = p (1 - p) = pq\)
2.3 Loi binomiale
2.3.1 Définition
Décrite pour la première fois par Isaac Newton en 1676 et démontrée pour la première fois par le mathématicien suisse Jacob Bernoulli en 1713, la loi binomiale est l’une des distributions de probabilité les plus fréquemment rencontrées en statistique appliquée.
Soit l’application \(S_n : \Omega^n \longrightarrow \mathbb{R}^n\)
avec \(S_n = X_1 + X_2 +...+ X_i + ...+ X_n\) où \(X_i\) est une variable de Bernoulli
La variable binomiale, \(S_n\), représente le nombre de succès obtenus lors de la répétition de \(n\) épreuves identiques et indépendantes, chaque épreuve ne pouvant donner que deux résultats possibles.
Ainsi la loi de probabilité suivie par la somme de \(n\) variables de Bernoulli où la probabilité associée au succès est \(p\), est la loi binomiale de paramètres \(n\) et \(p\).
\(S_n : \Omega^n \longrightarrow \mathbb{R}^n\)
\(S_n = \sum\limits_{i = 1}^n {X_i} \longmapsto \mathrm{B}(n,p)\)
La probabilité que \(S_n= k\), c’est à dire l’obtention de \(k\) succès au cours de \(n\) épreuves indépendantes est :
\(P({S_n} = k) = C_n^k{p^k}{q^{n - k}}\) Démonstration
Il est facile de démontrer que l’on a bien une loi de probabilité car :
\(\sum\limits_{k * 0}^n {P({S_n}} = k) = \sum\limits_{k = 0}^n {C_n^k} {p^k}{q^{n - k}} = {(p + q)^n} = 1\) car \(p + q = 1\)
Remarque : Le développement du binôme de Newton \((p+q)^n\) permet d’obtenir l’ensemble des probabilités pour une distribution binomiale avec une valeur \(n\) et \(p\) donnée. Il existe également des tables de la loi binomiale où les probabilités sont tabulées pour des valeurs \(n\) et \(p\) données.
Exemple:
Dans une expérience sur le comportement du rat, rattus norvegicus, on fait pénétrer successivement \(n\) rats dans un labyrinthe en forme de H. On étudie alors la probabilité que \(k\) rats empruntent la branche supérieure droite du H.
A chaque épreuve, deux évènements peuvent se produire : soit le rat suit l’itinéraire voulu (succès) soit il ne l’emprunte pas (échec). Sachant qu’il y a 4 itinéraires possibles (branches), la probabilité du succès \(p = 1/4\).
Hypothèse :
si les rats n’ont pas été conditionnés,
si la branche supérieure droite ne comporte aucun élément attractif ou répulsif,
si le choix de l’itinéraire d’un rat n’affecte pas le choix du suivant (odeurs)
alors : la variable aléatoire \(X\) « itinéraire emprunté pour \(x\) rats » suit une loi binomiale
\(X \to \beta (n,\frac{1}{4})\)
dont la distribution des probabilités est la suivante si l’on étudie le comportement de 5 rats :

Remarque :
Il est possible d’obtenir aisément les valeurs des combinaisons de la loi binomiale en utilisant le triangle de Pascal. De plus on vérifie que la somme des probabilités est bien égale à 1.
2.3.2 Espérance et variance
L’espérance d’une variable binomiale \(S_n\) est égale à \(E(S_n) = n p\)
en effet \(E ( S_n ) = E ( X_1 + X_2 +...+ X_i + ...+ X_n )\)
or \(E ( X_1 + X_2 +...+ X_i + ...+ X_n ) = \sum\limits_{i = 1}^n {E(X_i)}\) propriété de l’espérance
et \(E(S_n) = \sum\limits_{i = 1}^n {E(X_i)} = \sum\limits_{i = 1}^n p\) avec \(E ( X_i ) = p\) variable de Bernoulli
d’où \(E(S_n) = n p\)
La variance d’une variable binomiale \(S_n\) est égale à \(V ( S_n ) = n p q\)
en effet \(V ( S_n ) = V ( X_1 + X_2 +...+ X_i + ...+ X_n )\)
or \(V ( X_1 + X_2 +...+ X_i + ...+ X_n ) = \sum\limits_{i = 1}^n V ( X_i )\) propriété de la variance
et \(V(S_n) = \sum\limits_{i = 1}^n {V({X_i}) = \sum\limits_{i = 1}^n {pq} } \qquad\) avec \(V ( X_i )\) = pq car variable de Bernoulli
d’où \(V ( S_n ) = n p q\)
Exemple :
Dans le cadre de l’étude de comportement du rat , quel est en moyenne le nombre attendu de rats qui vont emprunter l’itinéraire prévu si l’expérience porte sur un lot de 20 rats ? Donnez également la variance et l’écart type de cette variable ? Réponse.
2.3.3 Symétrie et récurrence de la loi binomiale
La loi binomiale dépend des deux paramètres \(n\) et \(p\). Elle est symétrique pour \(p = 0,5\) et dissymétrique pour les autres valeurs de \(p\). La dissymétrie est d’autant plus forte :
pour \(n\) fixe, que \(p\) est différent de \(q\) (graphe)
pour \(p\) fixe que \(n\) est plus petit.
Afin de faciliter les calculs des probabilités, il est possible d’utiliser une formule de récurrence donnant les valeurs des probabilités successives :
\(P({S_n} = k) = \frac{{n - k + 1}}{k} \times \frac{p}{q} \times P({S_n} = k - 1) \qquad\) Démonstration
2.3.4 Stabilité de la loi binomiale
Théorème :
Si \(S_n\) et \(S_m\) sont deux variables indépendantes suivant des lois binomiales respectivement
\(S_n \rightarrow \mathrm{B} ( n , p )\) et \(S_m \rightarrow \mathrm{B} ( m , p )\) alors \(S_n + S_m \rightarrow \mathrm{B} ( n+m , p )\) démonstration
2.4 Loi de Poisson
La loi de Poisson découverte au début du XIXe siècle par le magistrat français Siméon-Denis Poisson s’applique souvent aux phénomènes accidentels où la probabilité \(p\) est très faible (\(p < 0,05\)). Elle peut également dans certaines conditions être définie comme limite d’une loi binomiale.
2.4.1 Approximation d’une loi binomiale
Lorsque \(n\) devient grand, le calcul des probabilités d’une loi binomiale
\(P({S_n} = k) = C_n^k{p^k}{q^{n - k}}\)
devient très fastidieux. On va donc, sous certaines conditions, trouver une approximation de \(p_k\) plus maniable.
Comportement asymptotique :
si \(n \rightarrow \infty\) et \(p \rightarrow 0\),
alors \(X:\mathrm{B}(n,p) \rightarrow \mathcal{P}(\lambda)\) avec \(n p \rightarrow \lambda\)
Remarque :
Cette approximation est correcte si \(n ≥ 50\) et \(n p ≤ 5\).
Exemple :
Soit une loi binomiale de paramètres \((100 ; 0,01)\), les valeurs des probabilités pour \(k\) de \(0\) à \(5\) ainsi que leur approximation à \(10^-3\) avec une loi de Poisson de paramètre \((\lambda = n p = 1)\) sont données dans le tableau ci-dessous :

Dans le cas de cet exemple où \(n =100\) et \(np =1\), l’approximation de la loi binomiale par une loi de poisson donne des valeurs de probabilités identiques à \(10^-3\) près.
2.4.2 Loi de Poisson
On appelle processus poissonnien (ou processus de Poisson), le modèle probabiliste des situations qui voient un flux d’évènements se produire les uns à la suite des autres de façon aléatoire (dans le temps et dans l’espace), obéissant aux conditions suivantes :
la probabilité de réalisation de l’évènement au cours d’une petite période ou sur une petite portion d’espace \(\Delta t\) est proportionnelle à \(\Delta t\) soit \(p \Delta t\) .
elle est indépendante de ce qui s’est produit antérieurement ou à côté,
la probabilité de deux apparitions sur le même D\(t\) est négligeable.
Ainsi, des évènements qui se réalisent de façon aléatoire comme des pannes de machines, des accidents d’avions, des fautes dans un texte, …peuvent être considérés comme relevant d’un processus poissonnien.
Une variable aléatoire \(X\) à valeurs dans \(\mathbb{R}\) suit une loi de Poisson de paramètre \(\lambda\) \((\lambda > 0)\) si les réels \(p^k\) sont donnés par
\(P(X = k) = \frac{{{\lambda ^k}{e^{ - \lambda }}}}{{k!}}\)
on note : \(X \rightarrow \mathcal{P}(\lambda)\)
Remarque : Une loi de Poisson est donnée par sa loi de probabilité :
\(\forall k , P ( X = k ) > 0\)
\(\sum\limits_{k \geq 0} {P(X=k)} = \sum\limits_{k \geq 0} { \frac{ e^{- \lambda} \lambda^k} { k! } } = e^{- \lambda} \sum\limits_{k \geq 0} { \frac{ \lambda^k} { k! } }\) or \(\sum\limits_{k \geq 0} {\frac{{{\lambda ^k}}}{{k!}}} = {e^\lambda }\)
d’où \(\sum\limits_{k \geq 0} {P(X = k)} = {e^{ - \lambda }}{e^\lambda } = 1\)
Exemple :
Une suspension bactérienne contient 5000 bactéries/litre. On ensemence à partir de cette suspension, 50 boites de Pétri, à raison d’1 cm3 par boite. Si \(X\) représente le nombre de colonies par boite, alors la loi de probabilité de \(X\) est :
\(X \rightarrow \mathcal{P} ( \lambda = 5)\)
La probabilité qu’il n’y ait aucune colonie sur la boite de Pétri est : \(P(X = 0) = \frac{5^0 e^{ - 5} } {0!} =\) 0,0067 soit approximativement 0,67 % de chance.
La probabilité qu’il n’y ait au moins une colonie sur la boite de Pétri est :
\(P(X > 0)=1- P(X = 0) = 1-0,0067 =\) 0,9933 soit 99,3 % de chance d’avoir au moins une colonie bactérienne qui se développe dans la boite de Pétri. (?theme=proba&chap=2#Evènement contraire))
Comme pour la loi binomiale, il est possible d’utiliser une formule de récurrence pour calculer les valeurs des probabilités successives :
\(P(X = k) = \frac{\lambda }{k}P(X = k - 1)\) Démonstration
2.4.3 Espérance et variance
L’espérance d’une variable aléatoire de Poisson est \(E(X) = \lambda\)
Par définition \(E(X) = \sum\limits_{k \geq 0} {k{p_k}} = \sum\limits_{k \geq 0} { k \frac{ { \lambda^k e^{ - \lambda }}}{k!}}\) avec \(k \in \mathbb{N}\) valeurs prises par la v.a. \(X\)
avec \(\sum\limits_{k \geq 0} {\frac{{{\lambda ^k}}}{{k!}} = [ {\lambda + \frac{{{\lambda ^2}}}{{1!}} + \frac{{{\lambda ^3}}}{{2!}} + .... + \frac{{{\lambda ^{k + 1}}}}{{k!}}} ]} = \lambda [ {1 + \frac{\lambda }{{1!}} + \frac{{{\lambda ^2}}}{{2!}} + ... + \frac{{{\lambda ^k}}}{{k!}}} ]\)
d’où \(E(X) = \lambda {e^{ - \lambda }}\sum\limits_{k > 0} {\frac{{{\lambda ^k}}}{{k!}}} = \lambda {e^{ - \lambda }}{e^\lambda } = \lambda\)
La variance d’une variable de Poisson est \(V(X) = \lambda\)
Par définition \(V(X) = \sum\limits_{k \geq 0} {{k^2}{p_k} - E{{(X)}^2}} = \sum\limits_{k \geq 0} {{k^2}\frac{{{\lambda ^k}{e^{ - \lambda }}}}{{k!}} - {\lambda ^2}}\)
en posant \({k^2} = k + k(k - 1)\), alors
\(\sum\limits_{k \geq 0} {{k^2}\frac{{{\lambda ^k}{e^{ - \lambda }}}}{{k!}} = \sum\limits_{k \geq 0} {\frac{k}{{k!}}} } {\lambda ^k}{e^{ - \lambda }} + \sum\limits_{k \geq 0} {\frac{{k(k - 1)}}{{k!}}} {\lambda ^k}{e^{ - \lambda }}\)
d’où \(\sum\limits_{k \geq 0} {k^2}\frac{{{\lambda ^k}{e^{ - \lambda }}}}{{k!}} = {e^{ - \lambda }}[ {\lambda + \frac{{{\lambda ^2}}}{{1!}} + \frac{{{\lambda ^3}}}{{2!}} + ... + \frac{{{\lambda ^{k + 1}}}}{{k!}}} ] + {e^{ - \lambda }}[ {{\lambda ^2} + \frac{{{\lambda ^3}}}{{1!}} + \frac{{{\lambda ^4}}}{{2!}} + .... + \frac{{{\lambda ^{k + 2}}}}{{k!}}} ]\)
d’où \(\sum\limits_{k \geq 0} {k^2}\frac{{{\lambda ^k}{e^{ - \lambda }}}}{{k!}} ={\lambda ^2}{e^{ - \lambda }}\sum\limits_{k \geq 0} {\frac{{{\lambda ^k}}}{{k!}}} + \lambda {e^{ - \lambda }}\sum\limits_{k \geq 0} {\frac{{{\lambda ^k}}}{{k!}}}\)
d’où \(V(X) = {\lambda ^2}{e^{ - \lambda }}{e^\lambda } + \lambda {e^{ - \lambda }}{e^\lambda } - {\lambda ^2} = \lambda\)
Remarque :
Il est à noter que dans le cas d’une variable aléatoire de Poisson, l’espérance et la variance prennent la même valeur. Ceci est un élément à prendre en compte lors des tests de conformité à une loi de probabilité.
Exemples :
Dans le cadre de la culture bactérienne, le nombre moyen de colonies attendu sur la boite de Pétri est : \(E(X) = \lambda =\) 5 colonies.
Ainsi si l’on effectue plusieurs cultures bactériennes (plusieurs boites de Pétri) à partir de la même solution initiale, on attend en moyenne cinq colonies pour l’ensemble des boites.
En ce qui concerne la variance et l’écart-type , on aura :
\(V(X) = \lambda = 5\) et \(\sigma (X) = \sqrt {V(X)} =\) 2,24 colonies.
2.4.4 Stabilité de la loi de Poisson
Si \(X\) et \(Y\) sont deux variables aléatoires indépendantes suivant des lois de Poisson respectivement
\(X \rightarrow \mathcal{P}(\lambda)\) et \(Y \rightarrow \mathcal{P}(\mu)\) alors \(X + Y \rightarrow \mathcal{P}(\lambda + \mu)\) démonstration
2.5 Loi binomiale négative
2.5.1 Définition
Sous le schéma de Bernoulli (épreuves identiques et indépendantes), on désire obtenir \(n\) succès et l’on considère la variable aléatoire discrète \(X\) qui représente le nombre d’épreuves indépendantes \(k\) nécessaire à l’obtention des \(n\) succès.
\(X\) suit une loi binomiale négative de paramètres \(n\) et \(p\) notée \(\mathrm{B}N (n,p)\) si :
\(P(X = k) = C_{k - 1}^{n - 1}{p^n}{q^{k - n}}\) avec \(k\), \(n \in \mathbb{N}\) et \(k \geq n\)
Remarque :
Dans le cas de la loi binomiale négative, le nombre de succès \(n\) est connu et l’on cherche le nombre d’épreuves \(k\), nécessaire pour obtenir les \(n\) succès. Ainsi le dernier évènement est connu car les épreuves cessent avec l’obtention du \(n\)ieme succès et l’on choisit \(n-1\) objets parmi \(k-1\).
Exemple :
Pour étudier le domaine vital d’une population de poissons, des émetteurs radio sont fixés au niveau de la nageoire dorsale après une légère anesthésie locale. Suite à divers aléas, on considère que 30 % des poissons équipés ne sont pas repérés par la suite. Si l’on considère qu’un minimum de 15 poissons doivent être suivis pour avoir des résultats statistiquement acceptables, la variable aléatoire \(X\) « nombre de poissons devant être équipés » suit une loi binomiale négative
\(X \rightarrow \mathrm{B}N (15, 0,70)\)
En posant comme hypothèse que les causes de pertes de liaisons radio soient suffisamment nombreuses pour assurer l’indépendance entre chaque épreuve, la probabilité d’être obligé d’équiper 20 poissons est de :
\(P(X = 20) = \frac{{19!}}{{14!\;5!}}{(0,70)^{15}}{(0,30)^5} =\) 0,13
2.5.2 Espérance et variance
L’espérance associée à une loi binomiale négative est : \(E(X) = \frac{n}{p}\)
La variance associée à une loi binomiale négative est : \(V(X) = n \frac{q}{p^2}\)
2.5.3 Loi géométrique
Lorsque le nombre de succès \(n\) est égal à 1, la loi de la variable aléatoire discrète \(X\) porte le nom de loi de Pascal ou loi géométrique de paramètre \(p\) telle que :
\(P(X = k) = p q ^{k - 1}\) avec \(k \in \mathbb{N}^*\)
Voici pourquoi :
Si l’on considère la variable aléatoire \(X\) « nombre de naissances observées avant l’obtention d’une fille » avec \(p = 1/2\) (même probabilité de naissance d’une fille ou d’un garçon), la loi suivit par \(X\) est une loi géométrique car :
\(X = 1\) si \(\{X = F\}\) avec \(P(X = 1) = p\)
\(X = 2\) si \(\{X = G ∩ F\}\) avec \(P(X = 2) = q p\)
\(X = 3\) si \(\{X= G ∩ G ∩ F\}\) avec \(P(X = 3) = q q p = q 2 p\)
d’où \(X = k\) si \(\{ X = G ∩ G ∩...∩.G ∩ F\}\) avec \(k-1\) \(\{X=G\}\) et donc \(P( X = k) = pq^{k-1}\)
D’où l’espérance associée à la loi géométrique est : \(E(X) = \frac{1}{p}\)
et la variance associée à la loi géométrique est : \(V(X) = \frac{q}{p^2}\)
3 Lois continues
Par définition, les variables aléatoires continues prennent des valeurs continues sur un intervalle donné.
3.1 Loi uniforme
3.1.1 Définition
La loi uniforme est la loi exacte de phénomènes continus uniformément répartis sur un intervalle.
La variable aléatoire \(X\) suit une loi uniforme sur le segment \([a,b]\) avec \(a < b\) si sa densité de probabilité est donnée par :
\(f(x) = \frac{1}{b - a}\) si \(x \in [a,b]\)
\(f(x) = 0\) si \(x \notin [a,b]\)

Quelques commentaires :
La loi uniforme continue étant une loi de probabilité, l’aire hachurée en rouge sur la figure ci-dessus vaut 1. Ceci implique que la valeur prise par \(f(x)\) vaut \(\frac{1}{b - a}\).
La probabilité que \(X \in [a’,b’]\) avec \(a’ < b\)’ et \(a’, b’ \in [a,b]\) vaut :
\(P(a' \leq X \leq b') = \int_{a'}^{b'} {f(x)dx = \int_{a'}^{b'} {\frac{{dx}}{{b - a}}} } = \frac{{b' - a'}}{{b - a}}\)
- La fonction de répartition associée à la loi uniforme continue est telle que :
\(F_X (x) = 0\) si \(x < a\)
\(F_X (x) = 1\) si \(x > b\)
\(F_X (x) = \frac{x-a}{b-a}\) si \(a \leq x \leq b\)
3.1.2 Espérance et variance
L’espérance de la loi uniforme continue vaut : \(E(X) = \frac{b + a}{2}\)
En effet par définition \(E(X) = \int_{ - \infty }^{ + \infty } {x f(x) dx}\)
\(E(X) = \int_{ - \infty }^a {x f(x) dx} + \int_a^b {x f(x) dx } + \int_b^{ + \infty } {x f(x) dx}\) cours analyse (Intégrale)
or \(\int_{ - \infty }^a x f(x)dx = 0\) et \(\int_b^{ + \infty } xf(x)dx = 0\) par définition de la loi uniforme continue
d’où \(E(X) = \int_a^b x\frac{1}{b - a} dx = \frac{1}{b - a} \int_a^b {x d x} = \frac{1}{b - a} [ {\frac{x^2}{2}} ]_ {a} ^b\)
\(E(X) = \frac{1}{{2(b - a)}} [ {{b^2} - {a^2}} ] = \frac{1}{{2(b - a)}} ( {b - a} ) ( {b + a} ) = \frac{{b + a}}{2}\)
La variance de la loi uniforme continue vaut : \(V(X) = \frac{ (b - a)^2 }{12}\)
En effet par définition \(V(X) = \int_{ - \infty }^{ + \infty } { {x^2} f(x) dx - E(X)^2 }\)
\(V(X) = \int_a^b {x^2 \frac{dx}{b - a} - E(X)^2}\) même simplification que pour l’espérance
\(V(X) = \frac{1}{b - a} [ \frac{x^3}{3} ]_ a ^ b - E(X)^2 = \frac{1}{b - a} [ \frac{b^3 - a^3}{3} ] - { [ {\frac{b + a}{2}} ]^2}\)
or \(\frac{1}{{b - a}}[ {\frac{{{b^3} - {a^3}}}{3}} ] = \frac{1}{3}({b^2} + ab + {a^2})\) et \([ {\frac{{{{(b + a)}^2}}}{4}} ] = \frac{1}{4}({b^2} + 2ab + {a^2})\)
d’où \(V(X) = \frac{1}{b - a} [ \frac{ b^3 - a^3}{3} ] - [ \frac{(b + a)^2}{4} ] = \frac{(b - a)^2}{12}\)
3.2 Loi normale ou loi de Laplace-Gauss
3.2.1 Définition
On parle de loi normale lorsque l’on a affaire à une variable aléatoire continue dépendant d’un grand nombre de causes indépendantes dont les effets s’additionnent et dont aucune n’est prépondérante (conditions de Borel). Cette loi acquiert sa forme définitive avec Gauss (en 1809) et Laplace (en 1812). C’est pourquoi elle porte également les noms de : loi de Laplace, loi de Gauss et loi de Laplace-Gauss.
Exemple :
Ainsi la taille corporelle d’un animal dépend des facteurs environnementaux (disponibilité pour la nourriture, climat, prédation, etc.) et génétiques. Dans la mesure où ces facteurs sont indépendants et qu’aucun n’est prépondérant, on peut supposer que la taille corporelle suit une loi normale.
Une variable aléatoire absolument continue \(X\) suit une loi normale de paramètres \((\mu , \sigma)\) si sa densité de probabilité est donnée par :
\(f : \mathbb{R} \longrightarrow \mathbb{R}\)
\(x \longmapsto f(x) = \frac{1}{{\sigma \sqrt {2\pi } }}{e^{ - \frac{1}{2}{{( {\frac{{x - \mu }}{\sigma }} )}^2}}}\) avec \(\mu \in \mathbb{R}\) et \(\sigma \in \mathbb{R}^+\)
Notation: \(X \longrightarrow \mathcal{N}(\mu , \sigma)\)
Remarque :
On admet que \(\int_{ - \infty }^{ + \infty } {f(x)dx} =1\) dans la mesure où l’intégration analytique est impossible.
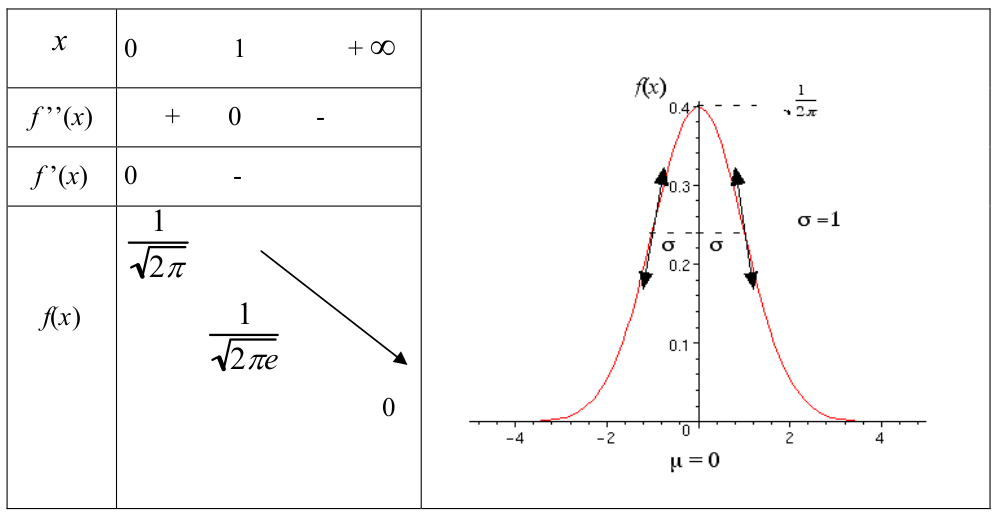
3.2.2 Etude de la fonction densité de probabilité
La fonction \(f\) est paire autour d’un axe de symétrie \(x = \mu\) car \(f(x + \mu ) = f(\mu - x)\)
d’où \(D_E = [\mu , +\infty[\)
La dérivé première \(f’(x)\) est égale à : \(f’(x) = - ( {\frac{x - \mu }{\sigma ^2}} )f(x)\) Démonstration
d’où \(f’(x) = 0\) pour \(x = \mu\) et \(f’(x) < 0\) pour \(x > \mu\)
La dérivé seconde \(f’’(x)\) est égale à : \(f’’(x) = - \frac{1}{\sigma ^2}( {1 - \frac{(x - \mu )^2}{\sigma ^2} } )f(x)\) Démonstration
d’où \(f’’(x) = 0\) pour \(x = \mu + \sigma\) et \(f’’(x) > 0\) pour \(x > \mu + \sigma\)

Remarque :
Le paramètre \(\mu\) représente l’axe de symétrie et \(\sigma\) le degré d’aplatissement de la courbe de la loi normale dont la forme est celle d’une courbe en cloche.
3.2.3 Espérance et variance
L’espérance de la loi normale vaut : \(E(X) = \mu\)
La variance de la loi normale vaut : \(V(X) = \sigma^2\)
3.2.4 Stabilité de la loi normale
Théorème :
Soient \(X_1\) et \(X_2\) deux variables aléatoires normales indépendantes de paramètres respectifs \((\mu_1 , \sigma_1 )\) , \((\mu_2 , \sigma_2 )\), alors leur somme \(X_1 + X_2\) est une variable aléatoire normale de paramètres \(( \mu_1 + \mu_2 , \sqrt {\sigma _ 1^2 + \sigma _ 2^2} )\).
Voici pourquoi :
- \(E(X_1 +X_2 ) = E(X_1 ) + E(X_2 )\) Propriété \(P_1\) de l’espérance.
or \(E(X_1 ) = \mu_1\) et \(E(X_2 ) = \mu_2\) d’où \(E(X_1 +X_2 ) = \mu1 + \mu2\)
- \(V(X_1 +X_2 ) = V(X_1 ) + V(X_2 )\) Propriété \(P_1\) de la variance lorsque \(X_1\) et \(X_2\) sont indépendantes.
or \(V(X_1) = {\sigma_1}^2\) et \(V(X_2) = {\sigma_2}^2\) d’où \(V(X_1 +X_2 ) = {\sigma_1}^2 + {\sigma_2}^2\)
Ce théorème se généralise immédiatement à la somme de \(n\) variables aléatoires normales indépendantes.
3.3 Loi normale réduite
3.3.1 Définition
Une variable aléatoire continue \(X\) suit une loi normale réduite si sa densité de probabilité est donnée par :
\(f : \mathbb{R} \longrightarrow \mathbb{R}\)
\(x \longmapsto f(x) = \frac{1}{{\sqrt {2\pi } }}{e^{ - \frac{1}{2}{x^2}}}\)
Remarque : \(f\) est bien une loi de probabilité car :
\(\forall x \in \mathbb{R}, \qquad f(x) ≥ 0\)
\(f\) est intégrable sur \(]-\infty, + \infty[\) et \(\int_{ - \infty }^{ + \infty } {f(x)dx = 1}\)
3.3.2 Etude de la fonction densité de probabilité
La fonction \(f\) est paire car \(f(-x) = f(x)\) d’où \(D_E = [0,+\infty [\)
La dérivé première est \(f’(x) = -x f(x)\) avec \(f ’(x) ≤ 0\) pour \(x ≥ 0\).
La dérivée seconde est \(f ’’(x) = -f(x) + x f(x) = (x –1) f(x)\) qui s’annule pour \(x = 1\) sur \(D_E\) .
Remarque : L’axe de symétrie correspond à l’axe des ordonnées \((x = 0)\) et le degré d’aplatissement de la courbe de la loi normale réduite est 1.
3.3.3 Espérance et variance
L’espérance d’une loi normale réduite est : \(E(X) = 0\)
En effet par définition \(E(X) = \int_{ - \infty }^{ + \infty } {x f(x) dx}\).
Or la fonction à intégrer est impaire d’où \(E(X)=0\) (cours d’analyse : intégrale)
La variance d’une loi normale réduite est : \(V(X) = 1\)
En effet par définition \(V(X) = \int_{ - \infty }^{ + \infty } {x^2}f(x)dx - E{(X)^2}\)
d’où \(V(X) = \frac{1}{{\sqrt {2\pi } }}\int_{ - \infty }^{ + \infty } {{x^2}{e^{ - \frac{{{x^2}}}{2}}}dx }\)
En effectuant une intégration par partie :
\(V(X) = \frac{1}{{\sqrt {2\pi } }}( {[ { - x{e^{ - \frac{{{x^2}}}{2}}}} ]_ { - \infty }^{ + \infty } - \int_{ - \infty }^{ + \infty } { - {e^{ - \frac{{{x^2}}}{2}}}dx } } )\) avec \(( {[ { - x{e^{ - \frac{{{x^2}}}{2}}}} ]_ { - \infty }^{ + \infty }} ) = 0\)
or \(V(X) = \frac{1}{{\sqrt {2\pi } }}\int_ { - \infty }^{ + \infty } {{e^{ - \frac{{{x^2}}}{2}}}dx } =1\) par définition d’une fonction de répartition
d’où \(V(X) = 1\)
3.3.4 Relation avec la loi normale
Si \(X\) suit une loi normale \(\mathcal{N} (\mu,\sigma)\), alors \(Z = \frac{X - \mu }{\sigma }\) , une variable centrée réduite suit une la loi normale réduite \(\mathcal{N} (0,1)\).
3.3.5 Calcul des probabilités d’une loi normale
La fonction de répartition de la loi normale réduite permet d’obtenir les probabilités associées à toutes variables aléatoires normales N (m,s) après transformation en variable centrée réduite.
On appelle fonction \(\pi\), la fonction de répartition d’une variable normale réduite \(X\) telle que :
\(\pi : \mathbb{R} \longrightarrow \mathbb{R}\)
\(t \longmapsto \pi (t) = P(X < t) = \frac{1}{{\sqrt {2\pi } }}\int_{ - \infty }^t {{e^{ - \frac{{{t^2}}}{2}}}dt}\)
Les propriétés associées à la fonction de répartition \(\pi\) sont :
(\(P_1\)) \(\pi\) est croissante, continue et dérivable sur \(\mathbb{R}\) et vérifie :
\(\lim\limits_{t \to + \infty } \pi (t) = 1\) et \(\lim\limits_{t \to - \infty } \pi (t) = 0\)
(\(P_1\)) \(\forall t \in \mathbb{R} \qquad \pi(t) + \pi(-t) = 1\)
\(\forall t \in \mathbb{R} \qquad \pi(t) + \pi(-t) = 2 \pi (t) - 1\)
Une application directe de la fonction \(\pi\) est la lecture des probabilités sur la table de la loi normale réduite.
3.4 Lois déduites de la loi normale
3.4.1 Loi du \({\chi ^2}\) de Pearson
Définition:
La loi de Pearson ou loi de \({\chi ^2}\) (Khi deux) trouve de nombreuses applications dans le cadre de la comparaison de proportions, des tests de conformité d’une distribution observée à une distribution théorique et le test d’indépendance de deux caractères qualitatifs. Ce sont les test du khi-deux.
Soit \(X_1 , X_2 , ..., X_i ,..., X_n\) , \(n\) variables normales centrées réduites , on appelle \({\chi ^2}\) la variable aléatoire définie par :
\(\chi ^2 = {X_1}^2 + {X_2}^2 +...+ {X_i}^2 +...+ {X_n}^2 = \sum\limits_{i = 1}^n {X_i^2}\)
On dit que \({\chi ^2}\) suit une loi de Pearson à \(n\) degrés de liberté (d.d.l.).
Remarque :
Si \(n =1\), la variable du \({\chi ^2}\) correspond au carré d’une variable normale réduite de loi \(\mathcal{N}(0 , 1)\) (?theme=proba&chap=3).
Propriétés :
(\(P_1\)) Si \(X_1 , X_2 , X_3 , ..., X_i ,..., X_n\) sont \(n\) variables normales centrées réduites et s’il existe \(k\) relations de dépendance entre ces variables alors \({X_1}^2 + {X_2}^2 +...+ {X_i}^2 +...+ {X_n}^2\) suit une loi de Pearson à \(n - k\) degrés de liberté.
(\(P_2\)) Si \(U\) suit une loi de Pearson à \(n\) d.d.l.
si \(V\) suit une loi de Pearson à \(m\) d.d.l.
et si \(U\) et \(V\) sont indépendantes alors \(U + V\) suit une loi de Pearson à \(n + m\) ddl
\(U - V\) suit une loi de Pearson à \(n-m\) ddl (si \(n<m\))

Remarque :
La constante \(C(n)\) est telle que \(\int_{ - \infty }^{ + \infty } {f(x)dx = 1}\). La distribution du \({\chi ^2}\) est dissymétrique et tend à devenir symétrique lorsque \(n\) augmente en se rapprochant de la [distribution normale](?theme=proba&chap=3 à laquelle elle peut être assimilée lorsque \(n > 30\).
Espérance et variance
L’espérance de la variable du \({\chi ^2}\) est : \(E(\chi ^2) = n\)
car par définition \(E(\chi ^2) = \sum\limits_{i = 1}^n {E(X_i^2} )\) avec \(X_i\) variable normale réduite
or \(V(X_i ) = E({X_i}^2 ) - {E(X_i )}^2 = 1\) pour la variable normale réduite avec \(E(X_i ) = 0\)
d’où \(E({X_i}^2 ) = 1\) et donc \(E(\chi ^2) = n\)
La variance de la variable du \({\chi ^2}\) est : \(V({\chi ^2}) = 2n\)
car par définition les \(X_i\) variables normales réduites étant indépendantes,
\(V({\chi ^2}) = \sum\limits_{i = 1}^n V({X_i}^2)\) et d’autre part \(V({X_i}^2) = E({X_i}^4 ) – [ E({X_i}^2 )]^2\)
or \(E({X_i}^4 ) = 3\) d’où \(V({X_i}^2) = 3 – 1 = 2\)
ainsi \(V({\chi ^2}) = \sum\limits_{i = 1}^n {V(X_i^2} )= 2n\)
3.4.2 Loi de student
La loi de Student (ou loi de Student-Fisher) est utilisée lors des tests de comparaison de paramètres comme la moyenne et dans l’estimation de paramètres de la population à partir de données sur un échantillon (Test de Student). Student est le pseudonyme du statisticien anglais Gosset qui travaillait comme conseiller à la brasserie Guinness et qui publia en 1908 sous ce nom, une étude portant sur cette variable aléatoire.
Soit \(U\) une variable aléatoire suivant une loi normale réduite \(\mathcal{N}(0 , 1)\) et \(V\) une variable aléatoire suivant une loi de Pearson à \(n\) degrés de liberté \({\chi_n}^2\) , \(U\) et \(V\) étant indépendantes, on dit alors que \({T_n} = \frac{U}{{\sqrt {\frac{V}{n}} }}\) suit une loi de Student à \(n\) degrés de liberté.

Remarque : La constante \(C(n)\) est telle que \(\int_{ - \infty }^{ + \infty } {f(x)dx = 1}\). La distribution du \(T\) de Student est symétrique et [tend vers une loi normale](?theme=proba&chap=3 lorsque \(n\) augmente indéfiniment.
Espérance et variance
L’espérance de la variable de Student est : \(E(T) = 0\) si \(n >1\)
La variance de la variable de Student est : \(V(T) = \frac{n}{{n - 2}}\) si \(n > 2\)
3.4.3 Loi de Fisher-Snedecor
La loi de Fisher-Snedecor est utilisée pour comparer deux variances observées et sert surtout dans les très nombreux tests d’analyse de variance et de covariance.
Soit \(U\) et \(V\) deux variables aléatoires indépendantes suivant une loi de Pearson respectivement à \(n\) et \(m\) degrés de liberté.
On dit que \(F = \frac{U/n}{V/m}\) suit une loi de Fisher-Snedecor à \(\begin{Bmatrix} n \\ m \end{Bmatrix}\) degrés de liberté.

Remarque : Si \(n = 1\), alors on a la relation suivante : \({F_{(1,m)}} = \frac{U^2}{V/m} = {T_m}^2\) (?theme=proba&chap=3).
Espérance et variance
L’espérance de la variable de Fisher-Snédecor est : \(E(F) = \frac{m}{m - 2}\) si \(m >2\)
La variance de la variable de Fisher-Snédecor est : \(V(F) = \frac{{2{m^2}(n + m - 2)}}{{n{{(m - 2)}^2}(m - 4)}}\) si \(m > 4\)
4 Convergence
Dans ce paragraphe, sont traités des éléments de calcul des probabilités dont l’application statistique est nombreuse. La partie fondamentale est le théorème central limite. Les éléments présentés permettent de préciser ce que signifie l’ajustement d’une loi de probabilité par une autre (notion de convergence) et ainsi de justifier l’approximation d’une distribution observée par une loi théorique (chapitre 7). De plus ces éléments permettent de donner des limites d’erreurs possibles dans l’estimation d’un élément d’une population (chapitre 6).
4.1 Convergence en loi
Soit une suite de \(n\) variables aléatoires \(X_1 , X_2 , X_3 , ..., X_i ,..., X_n\). Cette suite converge en loi vers la variable aléatoire \(X\) de fonction de répartition \(F_X\) quand \(n\) augmente indéfiniment, si la suite des fonctions de répartition \({F_{{X_1}}},{F_{{X_2}}},{F_{{X_3}}},....,{F_{{X_I}}},....{F_{{X_n}}}\) tend vers la fonction de répartition \(F_X\) pour tout \(x\) pour lequel \(F_X\) est continue.
Exemple :
Nous avons montré que la loi de probabilité d’une variable binomiale tend vers une loi de Poisson lorsque \(n\) tend vers l’infini. Il en serait de même des fonctions de répartition correspondantes. On peut donc dire que la loi binomiale \(\mathrm{B}(n,p)\) converge en loi vers une loi de Poisson de paramètres \(n p\). (?theme=proba&chap=3doc)).
4.2 Le théorème central limite
Appelé également théorème de la limite centrale, il fut établi par Liapounoff et Lindeberg.
On se place dans une situation d’épreuves répétées, caractérisées par une suite \(X_1 , X_2 , X_3 , ..., X_i ,..., X_n\) de \(n\) variables aléatoires indépendantes et de même loi (espérance \(E(X_i) = m\) et variance \(V(X_i) = \sigma^2\)). On définit ainsi deux nouvelles variables aléatoires :
la somme \(S_n = X_1 , X_2 , X_3 , ..., X_i ,..., X_n\)
la moyenne \(M_n = \frac{{{X_1} + {X_2} + .... + {X_n}}}{n} = \frac{S_n}{n}\)
telles que :

Voici pouquoi :
Pour les deux variables aléatoires , les valeurs de l’espérance et de la variance sont liées aux propriétés de linéarité et d’indépendance.
Ces formules sont à la base des principaux estimateurs en statistique.
Théorème central limite
Soit la variable aléatoire \(S_n\) résultant de la somme de \(n\) variables aléatoires indépendantes et de même loi, on construit la variable centrée réduite telle que :
\({Z_n} = \frac{{{S_n} - n\mu }}{{( {\sigma \sqrt n } )}}\)
Alors pour tout \(t \in \mathbb{R}\), la fonction de répartition \(F_n (t) = P(Z_n < t)\) est telle que :
\({F_n}(t) \to \frac{1}{\sqrt {2\pi }} \int_{ - \infty }^t {{e^{ - \frac{{{z^2}}}{2}}}} dz\) quand \(n \to \infty\) c’est à dire \(\mathcal{N} (0,1)\).
Remarque : On peut calculer \(Z_n\) aussi bien à partir de \(S_n\) que de \(M_n\) car
\({Z_n} = \frac{{{S_n} - n\mu }}{{\sigma \sqrt n }} = \frac{ {M_n} - \mu }{ \sigma / {\sqrt n } }\)
Une variable aléatoire résultant de la somme de plusieurs v.a. ayant même loi et même paramètres est distribuée suivant une loi normale réduite lorsque le nombre d’épreuves \(n\) tend vers l’infini.
Le théorème central limite s’applique quelque soit la loi de probabilité suivie par les variables aléatoires discrètes ou continues, pourvu que les épreuves soient indépendantes, reproductibles et en très grand nombre.
Grâce au théorème de la limite centrale, on peut voir que des phénomènes dont la variation est engendrée par un nombre important de causes indépendantes sont généralement susceptibles d’être représentés par une loi normale.
A l’aide de la convergence en loi et du théorème central limite, il est possible de faire l’approximation de certaines lois de probabilités par d’autres (?theme=proba&chap=3).
4.3 Convergence vers la loi normale
4.3.1 La loi binomiale
Théorème :
Soit \(X\) une variable aléatoire suivant une loi binomiale de paramètres \((n,p)\), alors
\(P(X * k) \approx \frac{1}{{\sigma \sqrt {2\pi } }}{e^{ - \frac{1}{2}( {\frac{{k - \mu }}{\sigma }} )}}^2\) quand \(n \to \infty\) c’est à dire \(\mathcal{N} (0,1)\)
avec \(\mu = E(X) = n p\) et \(\sigma^2 = V(X) = n p q\)
La convergence est d’autant plus rapide que \(p\) est voisin de 0,5, distribution symétrique pour la loi binomiale.
Remarque :
On considère que l’approximation est valable si on a à la fois \(np > 5\) et \(nq > 5\) (?theme=proba&chap=4).
4.3.2 Loi de Poisson
Théorème :
Soit \(X\) une variable aléatoire suivant une loi de Poisson de paramètre \(\lambda\) alors
\(P(X = k) \approx \frac{1}{{\sqrt \lambda \sqrt {2\pi } }}{e^{ - \frac{1}{2}( {\frac{{k - \lambda }}{{\sqrt \lambda }}} )}}^2 \qquad\) quand \(n \to \infty\) c’est à dire \(\mathcal{N} (0,1)\)
avec \(E(X) = \lambda\) et \(V(X) = \lambda\)
Remarque :
On considère qu’on peut faire ces approximations si \(\lambda \geq 20\) (?theme=proba&chap=4).
4.4 Inégalité de Bienaymé-Tchébycheff
L’inégalité de Markov et l’inégalité de Bienaymé-Tchébycheff s’appliquent aussi bien aux variables aléatoires discrètes ou absolument continues. Elles permettent pour une variable aléatoire \(X\) d’espérance \(E(X) = \mu\) et de variance \(\sigma^2\) d’évaluer la probabilité pour que \(X\) diffère de la moyenne d’une quantité inférieure à une valeur \(h\).
Le problème est de donner une consistance quantitative à la remarque déjà faite que, plus l’écart-type d’une variable aléatoire est faible, plus sa distribution de probabilité est concentrée autour de son espérance mathématique (?theme=proba&chap=3#degré d’aplatissement) de la loi normale). Afin de démontrer cette inégalité, nous allons présenter tout d’abord l’inégalité de Markov.
4.4.1 Inégalité de Markov
Soit \(X\) une variable aléatoire admettant une espérance \(E(X)\) et une variance \(V(X)\), étant donné, un réel \(h>0\) l’inégalité de Markov donne :
\(P(| X | \geq h) \leq \frac{1}{{{h^2}}}E({X^2})\)
Voici pourquoi :
\(P(| X | \geq h) = \sum\limits_{i \in I} {p_i}\) la sommation étant étendue à toutes les valeurs de \(i\) tels que \(|x_i| > h\)
dans ce cas : \(| {\frac{{{x_i}}}{h}} | \geq 1\) soit \(1 \leq \frac{{x_i^2}}{{{h^2}}} \Leftrightarrow {p_i} \leq {p_i}\frac{{x_i^2}}{{{h^2}}}\)
ainsi \(\sum\limits_{i \in I} {{p_i}} \leq \frac{1}{{{h^2}}}\sum\limits_{i \in I} {{p_i}x_i^2}\) d’où \(\sum\limits_{i \in I} {{p_i}} \leq \frac{1}{{{h^2}}}E({X^2})\) et \(P(| X | \geq h) \leq \frac{1}{{{h^2}}}E({X^2})\)
4.4.2 Inégalité de Bienaymé-Tchébycheff
Si l’on applique l’inégalité de Markov à la variable aléatoire \(X - \bar {X}\), on a
\(P( |X - \bar{X}| \geq h ) \leq \frac{1}{h^2} E[ (X - \bar{X} )^2 ]\)
or \(E[{(X - \bar{X} )^2}] = V(X) = {\sigma ^2}\) et en passant à l’évènement contraire, on a :
\(P(| {X - \bar{X} } | \leq h) \geq 1 - \frac{{{\sigma ^2}}}{{{h^2}}}\)
En posant \(h = t\sigma0\) avec \(t > 0\), on obtient l’inégalité suivante
\(P(| {\frac{{X - \bar{X} }}{\sigma }} | \leq t) \geq 1 - \frac{1}{{{t^2}}}\) sachant que \(\sigma > 0\)
qui est équivalente à
\(\forall t > 0 \quad P(| {\frac{{X - \bar{X} }}{\sigma }} | \geq t) \leq \frac{1}{{{t^2}}}\) inégalité de Bienaymé-Tchébycheff
Remarque : Ces inégalités n’ont d’intérêt que si \(t\) est assez grand.